4.運動の積分
4.1.エネルギー保存則
質点系の運動に関するラグランジアンLの時間に関する完全導関数から、次の関係式が得られます。\[
\begin{eqnarray}
\frac{d L}{dt}
& = &
\sum_i \frac{\partial L}{\partial q_i} \dot{q_i}
+ \sum_i \frac{\partial L}{\partial \dot{q_i}} \ddot{q_i}
+ \frac{\partial L}{\partial t}
\\
\\
& = &
\frac{d}{dt} \left( \sum_i \frac{\partial L}{\partial \dot{q_i}} \right) \dot{q_i}
+ \sum_i \frac{\partial L}{\partial \dot{q_i}} \frac{d \dot{q_i}}{dt}
+ \frac{\partial L}{\partial t}
\\
\\
& = &
\frac{d}{dt} \left( \sum_i \frac{\partial L}{\partial \dot{q_i}} \dot{q_i} \right) + \frac{\partial L}{\partial t}
\end{eqnarray}
\]
\[
\therefore
\frac{d}{dt} \left( L - \sum_i \frac{\partial L}{\partial \dot{q_i}} \dot{q_i} \right)
=
\frac{\partial L}{\partial t}
\tag{4.1-1}
\]
時間の一様性(1.5節)に着目すると、Lは時刻tを陽には含まないため、(4.1-1)式右辺がゼロになり、運動に関する不変量Eが得られます。
\[
\sum_i \frac{\partial L}{\partial \dot{q_i}} \dot{q_i} - L
=
E(=const)
\tag{4.1-2}
\]
Lはエネルギーの次元を有するため(2.1節)、この定数Eもまたエネルギーであることがわかります。
以上より、(4.1-2)式はエネルギー保存則を意味することになり、
またこの保存則を満たす力学系を保存系と呼びます。
ここで、相互作用のあるラグランジアンを(4.1-2)式に代入します。 ただし、時間の一様性が設定されているため、ポテンシャルは時間を陽には含みません。
\[
\frac{\partial T}{\partial \dot{q_i}} \dot{q_i} - T + U
=
E
\tag{4.1-3}
\]
運動エネルギーは速度の二次形式(2.1節)であるため、オイラーの同次関数の定理より、
\[
\frac{\partial T}{\partial \dot{q_i}} \dot{q_i}
=
2T
\tag{4.1-4}
\]
であり、結局ニュートン力学のエネルギー保存則と同じ式を得ることができます。
\[
E
=
T + U
\tag{4.1-5}
\]
このように、エネルギー保存則が成り立つ系は、ポテンシャルが時間を陽に含まなければよいことがわかります。
このようなラグランジアンは、前節でみた(1)孤立系、または(2)時間によらない力場にある系となります。
また、これは慣性系以外にも成り立ちます
(慣性系の前提は、本節には含まれていません)。
4.2.運動量保存則
空間の一様性(1.5節)に着目すると、孤立系(内部相互作用のある系)の力学的性質、つまりラグランジアンは任意の平行移動に対して不変となります。 よって、微小変位ε(速度不変)を系全体に与えても、系のラグランジアンLは不変である、という条件を与えることができます。 今、系全体と系を構成する各質点の位置ベクトルは次のように表せます。- 系全体:\( \bf{r'} = \bf{r} + \bf{\epsilon} \)
- 系の各質点:\( \bf{r_j'} = \bf{r_j} + \bf{\epsilon}\)
\[
\delta L
=
L' - L
\simeq
\epsilon \cdot \sum_j \frac{\partial L}{\partial \bf{r_j}}
=0
\tag{4.2-2}
\]
であり、これが任意のεに対して(4.2-2)式を満足しなければなりません。
よって、(1.3-6)式と合わせて
\[
\sum_j \frac{\partial L}{\partial \bf{r_j}}
=
\sum_j \frac{d}{dt} \left( \frac{\partial L}{\partial \bf{v_j}} \right)
=
\bf{0}
\tag{4.2-3}
\]
を得ます。
ここで新たなベクトル
\[
\sum_j \frac{\partial L}{\partial \bf{v_j}}
=
\sum_j \bf{P_j}
=
\bf{P}
\tag{4.2-4}
\]
を導入すると、(4.2-3)式を満たすには、Pは定ベクトルでなければなりません。
このPを系全体の運動量、Pjを質点の運動量と呼び、Pが一定に保たれることを運動量保存則といいます。
なお、慣性系における運動量は、このLに\( 1/2m_i v_i^2 - U \)を代入して、
\[
\begin{eqnarray}
\sum_j \frac{\partial}{\partial \bf{v_j}} \left( \frac{1}{2}mv_i^2 - U \right)
& = &
\sum_j m_j \bf{v_j}
\\
& = &
\sum_j \bf{P_j}
\\
& = &
\bf{P}
\end{eqnarray}
\tag{4.2-5}
\]
となり、ニュートン力学で知られる運動量と同じものが得られます。
今、系には孤立系という縛りを与えていましたが、それを少し緩和しても運動量保存則は一部で成り立ちます。 そこで、運動量保存則を満足する条件について見ていきます。 (4.2-3)式に立ち返ると、
\[
\sum_j \frac{\partial L}{\partial \bf{r_j}}
=
\bf{0}
\tag{4.2-6}
\]
であり、ラグランジアンLに(T-U)を代入すると、
\[
\sum_j \frac{\partial}{\partial \bf{r_j}}(T - U)
=
- \sum_j \frac{\partial U}{\partial \bf{r_j}}
=
\bf{0}
\tag{4.2-6}
\]
これは、系のすべての質点にかかる相互作用力の合計が0であることを意味しています。
この内容からわかることは、次の通りです。
- 運動量保存則が3つの成分すべてで満足するには系に外力が作用しないこと
- 仮に座標軸に平行に外力が作用した場合、それ以外の座標においては運動量保存則を満足する
4.3.角運動量保存則
空間の等方性(1.5節)に着目すると、質点系の力学的性質、つまりラグランジアンLは系全体の重心位置を変えない任意の回転に対して不変です。 そこで、質点系の方向だけを任意の微小角δψ(回転ベクトル)回転させたとき、系を構成する各質点の変位は次のように表せます。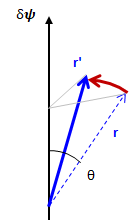
\[
\delta \bf{r}
=
\bf{r'}(\bf{\psi} + \delta \bf{\psi}) - \bf{r}(\psi)
\simeq
\frac{\partial \bf{r}}{\partial \bf{\psi}} \delta \bf{\psi}
\]
また、
\[
\bf{r}
=
\left(
\begin{array}{c}
r \sin \theta \cos \psi \quad
\\
r \sin \theta \sin \psi \quad
\\
r \cos \theta
\end{array}
\right)
\]
であり
\[
\frac{\partial \bf{r}}{\partial \bf{\psi}}
=
\left(
\begin{array}{c}
- \psi r \sin \theta \sin \psi \quad
\\
\psi r \sin \theta \cos \psi \quad
\\
0
\end{array}
\right)
\]
よって
\[
\delta \bf{r}
=
\delta \bf{\psi} \times \bf{r}
\tag{4.3-1}
\]
このとき、各質点の速度も変化します。
\[
\begin{eqnarray}
\delta \bf{v}
& = &
\bf{v}( \bf{\psi} + \delta \bf{\psi} ) - \bf{v}(\bf{\psi})
\\
& \simeq &
\frac{\partial \bf{v}}{\partial \bf{\psi}} \delta \bf{\psi}
\\
& = &
\delta \bf{\psi} \times \bf{v}
\end{eqnarray}
\tag{4.3-2}
\]
ここで、系全体のLが不変である条件は、L’(r’)とL(r)の差がゼロであることです。
\[
\begin{eqnarray}
\delta L
& = &
L(\bf{r_j} + \delta \bf{r_j}, \bf{v_j} + \delta \bf{v_j} ) - L(\bf{r_j}, \bf{v_j})
\\
\\
& \simeq &
\sum_j \left(
\frac{\partial L}{\partial \bf{r_j}} \cdot \delta \bf{r}
+ \frac{\partial L}{\partial \bf{v_j}} \cdot \delta \bf{v}
\right)
\end{eqnarray}
\]
\[
\therefore
\sum_j \left\{
\frac{d}{dt} \left( \frac{\partial L}{\partial \bf{v_j}} \right) \cdot \delta \bf{r}
+ \frac{\partial L}{\partial \bf{v_j}} \cdot \delta \bf{v}
\right\}
=
\bf{0}
\tag{4.3-3}
\]
(4.3-3)式左辺は、(4.2-5)式から各質点の運動量を用いて次のように変形できます。
\[
\begin{eqnarray}
\sum_j ( \bf{\dot{p_j}} \cdot \delta \bf{r} + \bf{p_j} \cdot \delta \bf{\dot{r}} )
& = &
\sum_j \{ \bf{\dot{p_j}} \cdot (\delta \bf{\psi} \times \bf{r_j}) + \bf{p_j} \cdot (\delta \bf{\psi} \times \bf{v_j}) \}
\\
& = &
\delta \bf{\psi} \frac{d}{dt} \sum_j (\bf{r_j} \times \bf{p_j})
\end{eqnarray}
\tag{4.3-4}
\]
微小回転角δψは任意のため、
\[
\frac{d}{dt} \sum_j (\bf{r_j} \times \bf{p_j})
=
\bf{0}
\tag{4.3-5}
\]
が得られ、最終的に次式が得られます。
\[
\sum_j (\bf{r_j} \times \bf{p_j})
=
\sum_j \bf{M_j}
=
\bf{M}
\tag{4.3-6}
\]
これは、質点系全体の回転運動に対して、定ベクトルとなるMが得られることになります。
このベクトルMを質点系全体の、Mjを各質点の角運動量と呼び、Mが一定に保たれることを角運動量保存則といいます。
(4.3-6)式も運動量保存則同様、たとえ1つの成分が成り立たなくても、それ以外の成分ごとにこの関係は維持されることになります。
また、角運動量は位置ベクトルに依存するため、座標原点の取り方に依存します。
これについては、力学/剛体のページで見ることにします。
なお、以下の書籍にこの章の詳細な説明が記述されています。


