質量特性座標変換
パラメータを入力し、“計算”ボタンをクリックします。
初期化したい場合は、F5キーを押してください。
初期化したい場合は、F5キーを押してください。
1. 入力値
※青枠は入力必須(数値は半角)
| 質量 | |||
|---|---|---|---|
| 重心位置 | |||
| Xcg | Ycg | Zcg | |
| 慣性テンソル | |||
| 指定方法: 重心周り 原点周り | |||
| Ixx | Iyy | Izz | |
| Ixy | Iyz | Izx | |
| 座標向き | |||
| Xs | Ys | Zs | |
| 座標系チェック: | |||
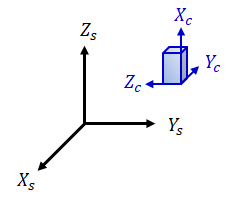 上図例について、システム座標系XsYsZsに対し、コンポーネント座標系XcYxZcの向きは次のように設定します。
上図例について、システム座標系XsYsZsに対し、コンポーネント座標系XcYxZcの向きは次のように設定します。Xs = -Yc : Ys = -Zc :Zs = Xc |
|||
2.算出値
| 質量 | ||
|---|---|---|
| 重心位置 | ||
| Xt | Yt | Zt |
| 慣性テンソル | ||
| Ixx | Iyy | Izz |
| Ixy | Iyz | Izx |


