1.最小作用の原理
“最小作用の原理”は力学の基本公理となるものです。 「あれ?慣性の法則じゃなかったっけ?」と不思議に思うかもしれません。 でも実は、“最小作用の原理と慣性の法則は同じもの”です。 これについては1.5節で見ていくことにします。1.1.一般座標
私たちが暮らす三次元空間で“位置”を表す方法は、直交座標系(x,y,z)を用いるのが一般的です。 とはいえ、位置を表す方法は、円柱座標系(r,ψ,z)、極座標系(r,ψ,θ)、またはその他の座標系、何でも構いません。 要は考察がしやすい座標系を任意に選択すればよいだけです。 さて力学的な考察を行う際、質点系の位置を一意に決定するためには、互いに独立な(質点の個数×次元)個分の座標が必要になります。 この独立な座標の数を自由度といいます (例えば、三次元空間内のn個の質点系の自由度は3nになります)。 さて、自由度sの系の座標を、座標系ごとにいちいち記号を変えて表現するのは得策ではありません。 そこで、座標系を気にせず汎用的な座標(q1,q2,…,qs)で表すとき、これを一般座標と呼びます。 また、この一般座標の時間に関する導関数を一般速度と呼びます。| 一般座標 | \( (q_1, q_2, q_3) \) | → | \( ( \dot{q_1}, \dot{q_2}, \dot{q_3} ) \) |
| 直交座標 | \( (x, y, z) \) | → | \( ( \dot{x}, \dot{y}, \dot{z} ) \) |
| 極座標 | \( (r, \psi, \theta) \) | → | \( ( \dot{r}, \dot{\psi}, \dot{\theta} ) \) |
ある座標系の成分(Q1,Q2,…,Qs)は、別の座標(q1,q2,…,qs)の一価関数として表すことができます。
\[
Q_i=Q_i(q_1, q_2, \cdots, q_s)
\\
(i=1, 2, \cdots, s)
\tag{1.1-1}
\]
一般速度については(1.1-1)式を時間微分すればよく、次の関係式が得られます。
\[
\begin{eqnarray}
\dot{Q_i}
& = &
\frac{dQ_i}{dt}
\\
& = &
\frac{\partial Q_i}{\partial q_1} \frac{d q_1}{dt}
+ \frac{\partial Q_i}{\partial q_2} \frac{d q_2}{dt}
+\cdots
+ \frac{\partial Q_i}{\partial q_s} \frac{d q_s}{dt}
\\
& = &
\sum_{j=1}^s \frac{\partial Q_i}{\partial q_j} \dot{q_j}
\end{eqnarray}
\tag{1.1-2}
\]
これは、一般速度の座標変換式にあたります。
ところで\( \dot{Q_i} \)は(1.1-2)式を見るとわかるように\( \dot{q_j} \)の一次式であることから、(1.1-2)式両辺を\( \dot{q_j} \)で微分することで、次の関係式が得られます。
\[
\frac{\partial Q_i}{\partial q_j}
=
\frac{\partial \dot{Q_i}}{\partial \dot{q_j}}
\tag{1.1-3}
\]
この式は、後半5章のポアソンの括弧式で再登場します。なお、本節以降、質点の個数や自由度等の添字については次のように表すことにします。
\( i \):自由度の数(最大\( s \))、
\( j \):質点の数(最大\( n \))、
\( k \):次元の数(最大\( d \))
\( s = n \times d \)
1.2.最小作用の原理
自由度sの質点系の力学的状態は、ある時刻tの位置ベクトルrj(座標qi)と速度vjをすべて同時に与えることで、一意に決定されます。 よって、質点系の力学的状態は次の関数によって表すことができます。\[
\begin{eqnarray}
L
& = &
L(\bf{r_1}, \cdots, \bf{r_n}, \bf{v_1}, \cdots, \bf{v_n}, t)
\\
& = &
L(q_1, \cdots, q_s, \dot{q_1}, \cdots, \dot{q_s}, t)
\end{eqnarray}
\tag{1.2-1}
\]
(ただし\( q_i,\dot{q_i} \)は時刻tの関数)
このとき、質点系の運動は次の条件に従います。 質点系が時刻t=ta、t=tbでそれぞれ座標ra、rb(点A、B)の位置にあるとします。 そのとき、作用Iと呼ばれる、関数Lの積分を次式で定義します。
\[
I
=
\int_{t_a}^{t_b} L(q_1, \cdots, q_s, \dot{q_1}, \cdots, \dot{q_s})dt
\tag{1.2-2}
\]
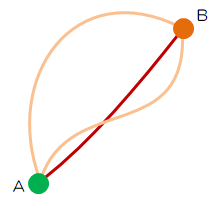
図1.2-1 運動の経路
すると、質点系の運動は、この作用Iを最小にする経路に沿って運動します。 これが最小作用の原理です。この最小作用の原理から運動方程式が導出されます。1.3.ラグランジュ方程式
ここで、最小作用の原理を満足する関数Lの条件を導きます。質点系が2点A、Bの間を運動する場合について考えます(図1.2-1)。 (1.2-2)式の作用Iを最小とする座標関数をq1(t),…, qs(t)とします。 このうちの1つ\( q_i(t) \)を、任意に微小量\( \delta q_i(t) \)(これを変分と呼びます)だけずらした関数として次式を定義します。
\[
q_i(t)+\delta q_i(t)
\tag{1.3-1}
\]
すると、\( q_i(t) \)が作用Iを最小にすることから、変分\( \delta q_i(t) \)を与えることによってIは必ず増加することになります。
また、系の運動はどのような経路をたどったとしても必ず点A、Bを通りますので、点A、Bでの変分は0でなければなりません。
\[
\delta q_i(t_a)
=
\delta q_i(t_b)
=
0
\tag{1.3-2}
\]
ここで、\( q_i(t) \)を\( q_i(t) + \delta q_i(t) \)に置き換えた時に生じる作用\( I \)の変化\( \delta I \)は、2次以上の微小項を無視することで、次のようになります
(tについては変分がないことに注意)。
\[
\begin{eqnarray}
\delta I
& = &
\int_{t_a}^{t_b} L(q_1+\delta q_1, \cdots,\dot{q_1}+\delta \dot{q_1}, \cdots, t) dt
- \int_{t_a}^{t_b} L(q_1, \cdots,\dot{q_1}, \cdots, t) dt
\\
& = &
\int_{t_a}^{t_b} \delta L dt
\\
& = &
\int_{t_a}^{t_b} \left( \frac{\partial L}{\partial q_i}\delta q_i + \frac{\partial L}{\partial \dot{q_i}}\delta \dot{q_i} \right) dt
\end{eqnarray}
\tag{1.3-3}
\]
さらに、(1.3-3)式右辺第二項は部分積分法によって、
\[
\begin{eqnarray}
\int_{t_a}^{t_b} \frac{\partial L}{\partial \dot{q_i}}\delta \dot{q_i} dt
& = &
\int_{t_a}^{t_b} \frac{\partial L}{\partial \dot{q_i}} \frac{d}{dt}(\delta q_i) dt
\\
\\
& = &
\left[ \frac{\partial L}{\partial \dot{q_i}} \delta q_i \right]_{t_a}^{t_b}
- \int_{t_a}^{t_b} \delta q_i \frac{d}{dt} \left(\frac{\partial L}{\partial \dot{q_i}} \right) dt
\\
\\
& = &
- \int_{t_a}^{t_b} \delta q_i \frac{d}{dt} \left(\frac{\partial L}{\partial \dot{q_i}} \right) dt
\end{eqnarray}
\\
\tag{1.3-4}
\]
(∵(1.3-2)式による)
さらに、系の運動が作用Iを最小※(実際は極小値)にするには、“\( \delta I = 0 \)”でなければなりません。
\[
\delta I
=
\int_{t_a}^{t_b} \delta q_i \left\{
\frac{\partial L}{\partial q_i} -
\frac{d}{dt} \left(\frac{\partial L}{\partial \dot{q_i}} \right)
\right\} dt
=
0
\tag{1.3-5}
\]
任意の\( \delta q_i \)に対し、\( \delta I \)が恒等的に0を満たすには、被積分関数が常に0でなければなりません。
\[
\frac{\partial L}{\partial q_i} -
\frac{d}{dt} \left(\frac{\partial L}{\partial \dot{q_i}} \right)
=
0
\tag{1.3-6}
\]
この(1.3-6)式が最小作用の原理を満たす関数Lの条件式であり、ラグランジュ方程式と呼び、関数Lをラグランジアンと呼びます。
(1.3-6)式は時間に関する二階微分方程式であり、よって質点系の加速度、速度、座標の間を結びつける式になっています。
つまり、ラグランジュ方程式は運動方程式そのものであり、ニュートン力学の運動方程式(F=ma)と同じものです。
形があまりに違うのでほんとに??と思うかもしれませんが、これについては後の章で証明することにします。
1.4.ラグランジアンの不定性
(1)ラグランジアンの係数の不定性
系が2つの部分A、Bで成り立っていて、相互作用はないものとします。 このとき、A、BのラグランジアンLA、LBは、互いに相手の量を含むことはありません。 よって、系全体のラグランジアンには単純な加法性が成り立ちます。\[
L=L_A+L_B
\tag{1.4-1}
\]
この加法性には、個々のラグランジアンに同時に同一の定数をかけても、その関係性は変わらない、という性質があります。
\[
aL=aL_A+aL_B
\leftrightarrow
L=L_A+L_B
\]
これは、物理量の測定単位をどう選んでも構わない、という任意性が残ることになります。
(2)1.4.2.任意関数\( f(q,t) \)の時間についての完全導関数の不定性
2つのラグランジアンL、L’があって、その違いが座標と時間の任意関数\( f(q,t) \)の時間についての完全導関数であるとします。\[
L'(q,\dot{q},t)=L(q,\dot{q},t)+\frac{d}{dt}f(q,t)
\tag{1.4-2}
\]
ここで、作用I’と作用Iの差を計算します((1.3-3)式を参考に)。
\[
\begin{eqnarray}
\delta I'
& = &
\int_{t_a}^{t_b} L'(q + \delta q,\dot{q} + \delta \dot{q}, t) dt - \int_{t_a}^{t_b} L'(q, \dot{q}, t) dt
\\
\\
& = &
\delta I + \int_{t_a}^{t_b} \frac{d}{dt} f(q + \delta q,t) dt - \int_{t_a}^{t_b} \frac{d}{dt}f(q,t) dt
\\
\\
& \simeq &
\delta I + \int_{t_a}^{t_b} \frac{d}{dt} \left( \frac{\partial f}{\partial q} \delta q \right) dt
\\
\\
& = &
\delta I + \left[ \frac{\partial f}{\partial q}\delta q \right]_{t_a}^{t_b}
\\
\\
& = &
\delta I
\end{eqnarray}
\tag{1.4-3}
\]
(∵(1.3-2)式による)
これは、任意関数\( f(q,t) \)の時間についての完全導関数を付けても運動方程式の形は変わらない=不定性を表しています。 この不定性はラグランジアンを特定するにあたり重要になります。
1.5.慣性の法則
質点系の運動を記述する際に必要となるのが座標系です。 この座標系の取り方を変えると、運動の見え方も変わってしまうのが一般的です。 そこで、座標系に以下の特徴を与えます。- 空間と時間の一様性:一様性=全体に均質で同じ性質を持つ
- 空間と時間の等方性:等方性=方向によって性質が変わらない
ここで、空間と時間に関する(1)(2)の性質を満たすラグランジアンの性質について見ていきます。
| (1) | 空間と時間の一様性 | → | 座標、時刻に無関係 | → | \( L(\bf{r}, \bf{v}, t) = L(\bf{v}) \) |
| (2) | 空間と時間の等方性 | → | 速度の方向に無関係 | → | \( L(\bf{v}) = L(\bf{v \cdot v})= L(v^2) \) |
\[
\begin{eqnarray}
& &
\frac{d}{dt} \left( \frac{\partial L(v^2)}{\partial \dot{q_i}} \right)
=
\frac{\partial L(v^2)}{\partial q_i}
=0
\\
\\
& \rightarrow \ &
\frac{\partial L(v^2)}{\partial v_i}
=
const
\end{eqnarray}
\tag{1.5-1}
\]

が得られ、速度vは定ベクトルでなければなりません (定ベクトルでなければ、上式は一定にはなりません)。 つまり、(1)(2)の条件において、自由な質点の運動は等速度運動を維持することになり、つまるところ、最小作用の原理から慣性の法則が得られたことになります。 ただし、(1)(2)の条件を満たす慣性系は無数に存在し、今回の結論は慣性系選択の任意性が保証されています。
この第1章の詳しい内容については、こちらの書籍に記述されていますので、ぜひ参考にしてみてください。


